




Գերբարձր ճշգրտության MZM մոդուլյատոր՝ լարման կարգավորիչ, ավտոմատ լարման կարգավորիչ


Հատկանիշ
• Լարման լարման կառավարում Peak/Null/Q+/Q− ռեժիմներում
• Լարման լարման կառավարում կամայական կետում
• Գերճշգրիտ կառավարում. 50dB առավելագույն մարման հարաբերակցություն Null ռեժիմում;
±0.5◦ ճշգրտություն Q+ և Q− ռեժիմներում
• Ցածր տատանման ամպլիտուդ։
0.1% Vπ NULL և PEAK ռեժիմներում
2% Vπ Q+ և Q− ռեժիմներում
• Բարձր կայունություն՝ լիովին թվային ներդրմամբ
• Ցածր պրոֆիլ՝ 40 մմ (Լայնություն) × 30 մմ (Խորություն) × 10 մմ (Բարձրություն)
• Հեշտ օգտագործման համար. ձեռքով կառավարում՝ մինի ցատկիչով;
ճկուն OEM գործողություններ MCU UART2-ի միջոցով
• Երկու տարբեր ռեժիմներ՝ լարման լարում ապահովելու համար. a. Ավտոմատ լարման կառավարում
բ. Օգտագործողի կողմից սահմանված շեղման լարում

Դիմում
• LiNbO3 և այլ MZ մոդուլյատորներ
• Թվային NRZ, RZ
• Պուլսային կիրառություններ
• Բրիլլուենի ցրման համակարգ և այլ օպտիկական սենսորներ
• CATV հաղորդիչ
Արդյունավետություն
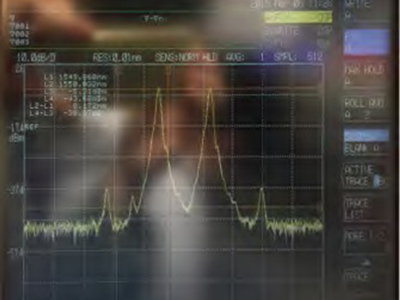
Նկար 1. Կրողի ճնշում
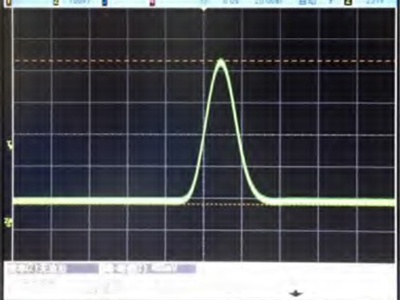
Նկար 2. Իմպուլսի առաջացում

Նկար 3. Մոդուլյատորի առավելագույն հզորությունը
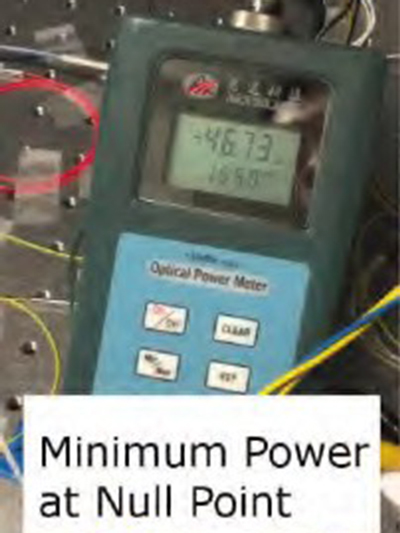
Նկար 4. Մոդուլյատորի նվազագույն հզորությունը
Առավելագույն DC մարման հարաբերակցություն
Այս փորձի ընթացքում համակարգին ռադիոհաճախականության ազդանշաններ չեն կիրառվել: Չափվել է մաքուր հաստատուն հոսանքի մարում:
1. Նկար 5-ը ցույց է տալիս մոդուլյատորի ելքի օպտիկական հզորությունը, երբ մոդուլյատորը կառավարվում է գագաթնակետում: Դիագրամում այն ցույց է տալիս 3.71 դԲմ:
2. Նկար 6-ը ցույց է տալիս մոդուլյատորի ելքի օպտիկական հզորությունը, երբ մոդուլյատորը կառավարվում է զրոյական կետում: Դիագրամում այն ցույց է տալիս -46.73 դԲմ: Իրական փորձի դեպքում արժեքը տատանվում է -47 դԲմ-ի սահմաններում, և -46.73-ը կայուն արժեք է:
3. Հետևաբար, չափված կայուն DC մարման հարաբերակցությունը 50.4 դԲ է։
Բարձր մարման հարաբերակցության պահանջները
1. Համակարգի մոդուլյատորը պետք է ունենա բարձր մարման հարաբերակցություն։ Համակարգի մոդուլյատորի բնութագիրն է որոշում, թե որ առավելագույն մարման հարաբերակցությանը կարելի է հասնել։
2. Պետք է հոգ տանել մոդուլյատորի մուտքային լույսի բևեռացման մասին: Մոդուլյատորները զգայուն են բևեռացման նկատմամբ: Ճիշտ բևեռացումը կարող է բարելավել մարման հարաբերակցությունը 10 դԲ-ից բարձր: Լաբորատոր փորձարկումներում սովորաբար անհրաժեշտ է բևեռացման կարգավորիչ:
3. Համապատասխան լարման կարգավորիչներ: Մեր DC մարման հարաբերակցության փորձի ժամանակ ձեռք է բերվել 50.4 դԲ մարման հարաբերակցություն: Մինչդեռ մոդուլյատորի արտադրողի տվյալների թերթիկում նշված է միայն 40 դԲ: Այս բարելավման պատճառն այն է, որ որոշ մոդուլյատորներ շատ արագ են շեղվում: Rofea R-BC-ANY լարման կարգավորիչները թարմացնում են լարման լարումը յուրաքանչյուր 1 վայրկյանը՝ արագ արձագանք ապահովելու համար:
Տեխնիկական բնութագրեր
| Պարամետր | Մին | Տիպ | Մաքս | Միավոր | Պայմաններ |
| Կառավարման արդյունավետություն | |||||
| Ոչնչացման հարաբերակցություն | ՄԵՐ 1 | 50 | dB | ||
| ՔՀԿ2 | −55 | −65 | −70 | dBc | Տատանման ամպլիտուդ՝ 2%Vπ |
| Կայունացման ժամանակը | 4 | s | Հետևման կետեր՝ Null և Peak | ||
| 10 | Հետևման կետեր՝ Q+ և Q- | ||||
| Էլեկտրական | |||||
| Դրական հոսանքի լարում | +14.5 | +15 | +15.5 | V | |
| Դրական հոսանք | 20 | 30 | mA | ||
| Բացասական հզորության լարում | -15.5 | -15 | -14.5 | V | |
| Բացասական հոսանք | 2 | 4 | mA | ||
| Ելքային լարման միջակայք | -9.57 | +9.85 | V | ||
| Ելքային լարման ճշգրտությունը | 346 | մՎ | |||
| Դիթերի հաճախականությունը | 999.95 | 1000 | 1000.05 | Hz | Տարբերակ՝ 1 կՀց տատանման ազդանշան |
| Դիթերի ամպլիտուդ | 0.1%Vπ | V | Հետևման կետեր՝ Null և Peak | ||
| 2%Vπ | Հետևման կետեր՝ Q+ և Q- | ||||
| Օպտիկական | |||||
| Մուտքային օպտիկական հզորություն 3 | -30 | -5 | դԲմ | ||
| Մուտքային ալիքի երկարությունը | 780 | 2000թ. | nm | ||
1. MER-ը վերաբերում է մոդուլյատորի մարման հարաբերակցությանը: Ստացված մարման հարաբերակցությունը սովորաբար մոդուլյատորի տվյալների թերթիկում նշված մարման հարաբերակցությունն է:
2. CSO-ն վերաբերում է երկրորդ կարգի կոմպոզիտային ազդանշանին: CSO-ն ճիշտ չափելու համար պետք է ապահովել RF ազդանշանի, մոդուլյատորների և ընդունիչների գծային որակը: Բացի այդ, համակարգի CSO ցուցմունքները կարող են տարբեր լինել տարբեր RF հաճախականություններում աշխատելիս:
3. Խնդրում ենք նկատի ունենալ, որ մուտքային օպտիկական հզորությունը չի համապատասխանում ընտրված շեղման կետում առկա օպտիկական հզորությանը։ Այն վերաբերում է առավելագույն օպտիկական հզորությանը, որը մոդուլյատորը կարող է արտահանել կարգավորիչ, երբ շեղման լարումը տատանվում է -Vπ-ից մինչև +Vπ։
Օգտագործողի ինտերֆեյս
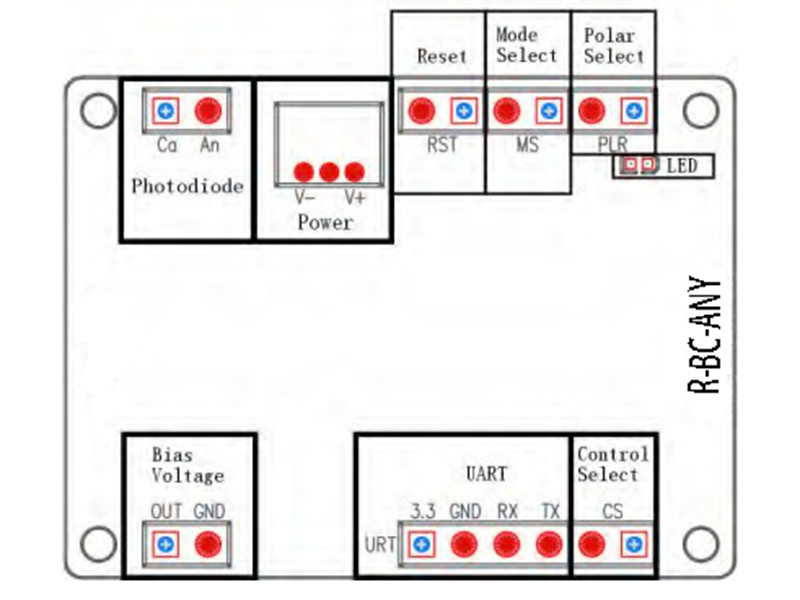
Նկար 5. Հավաքում
| Խումբ | Գործողություն | Բացատրություն |
| Ֆոտոդիոդ 1 | PD: Միացրեք MZM ֆոտոդիոդի կաթոդը | Տրամադրեք լուսային հոսանքի հետադարձ կապ |
| GND: Միացրեք MZM ֆոտոդիոդի անոդը | ||
| Հզորություն | Լարվածության կարգավորիչի սնուցման աղբյուր | V-: միացնում է բացասական էլեկտրոդը |
| V+: միացնում է դրական էլեկտրոդը | ||
| Միջին զոնդ. միացնում է հողանցման էլեկտրոդը | ||
| Վերագործարկում | Տեղադրեք ցատկիչը և 1 վայրկյան հետո հանեք այն | Վերագործարկեք կարգավորիչը |
| Ռեժիմի ընտրություն | Տեղադրեք կամ քաշեք դուրս ցատկիչը | առանց ցատկողի՝ զրոյական ռեժիմ; ցատկողով՝ քառակի ռեժիմ |
| Polar Select2 | Տեղադրեք կամ քաշեք դուրս ցատկիչը | առանց ցատկողի՝ դրական բևեռ; ցատկով` բացասական բևեռ |
| Լարման լարում | Միացեք MZM լարման միացքին | OUT-ը և GND-ը ապահովում են մոդուլյատորի համար շեղման լարումներ |
| LED | Մշտապես միացված | Աշխատում է կայուն վիճակում |
| Միացնել-անջատել կամ անջատել-միացնել յուրաքանչյուր 0.2 վայրկյանը մեկ | Տվյալների մշակում և վերահսկիչ կետի որոնում | |
| Միացնել-անջատել կամ անջատել-միացնել յուրաքանչյուր 1 վայրկյանը մեկ | Մուտքային օպտիկական հզորությունը չափազանց թույլ է | |
| Միացնել-անջատել կամ անջատել-միացնել յուրաքանչյուր 3 վայրկյանը մեկ | Մուտքային օպտիկական հզորությունը չափազանց ուժեղ է | |
| UART | Կառավարեք կառավարիչը UART-ի միջոցով | 3.3: 3.3V հղման լարում |
| GND: Հիմք | ||
| RX: Կառավարիչի ընդունում | ||
| TX: Կառավարիչի փոխանցում | ||
| Կառավարման ընտրություն | Տեղադրեք կամ քաշեք դուրս ցատկիչը | առանց ցատկողի՝ ցատկողի կառավարում; ցատկով. UART կառավարում |
1. Որոշ MZ մոդուլյատորներ ունեն ներքին լուսադիոդներ: Կառավարիչի կարգավորումը պետք է ընտրել կառավարիչի լուսադիոդի կամ մոդուլյատորի ներքին լուսադիոդի օգտագործման միջև: Լաբորատոր փորձերի համար խորհուրդ է տրվում օգտագործել կառավարիչի լուսադիոդը երկու պատճառով: Նախ, կառավարիչի լուսադիոդը ապահովել է որակը: Երկրորդ, ավելի հեշտ է կարգավորել մուտքային լույսի ինտենսիվությունը: Նշում. Եթե օգտագործում եք մոդուլյատորի ներքին լուսադիոդ, խնդրում ենք համոզվել, որ լուսադիոդի ելքային հոսանքը խիստ համեմատական է մուտքային հզորությանը:
2. Բևեռային քորոցը օգտագործվում է կառավարման կետը Peak-ի և Null-ի միջև Null կառավարման ռեժիմում (որոշվում է Mode Select քորոցով) կամ Quad+-ում փոխելու համար։
և Quad-՝ Quad կառավարման ռեժիմում: Եթե բևեռային քորոցի ջամփերը տեղադրված չէ, կառավարման կետը կլինի Null՝ Null ռեժիմում, կամ Quad+՝ Quad ռեժիմում: RF համակարգի ամպլիտուդը նույնպես կազդի կառավարման կետի վրա: Երբ RF ազդանշան չկա կամ RF ազդանշանի ամպլիտուդը փոքր է, կառավարիչը կարող է կողպել աշխատանքային կետը ճիշտ կետին՝ MS-ի և PLR ջամփերի կողմից ընտրված եղանակով: Երբ RF ազդանշանի ամպլիտուդը գերազանցում է որոշակի շեմը, համակարգի բևեռը կփոխվի, այս դեպքում PLR վերնագիրը պետք է լինի հակառակ վիճակում, այսինքն՝ ջամփերը պետք է տեղադրվի, եթե այն տեղադրված չէ, կամ հանվի, եթե տեղադրված է:
Տիպիկ կիրառություն
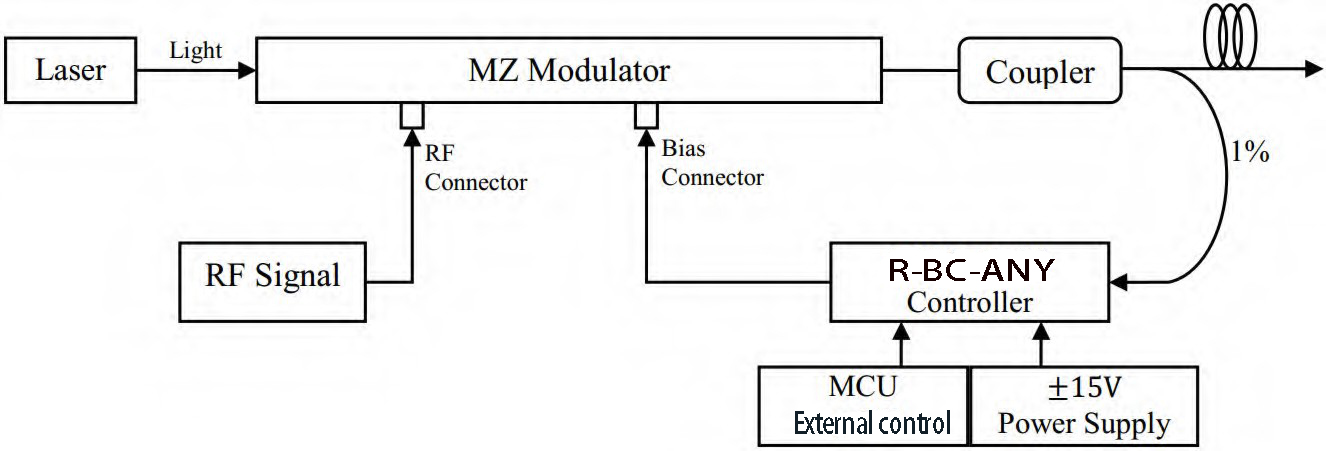
Կառավարիչը հեշտ է օգտագործել։
Քայլ 1. Միացրեք միակցիչի 1% միացքը կառավարիչի ֆոտոդիոդին։
Քայլ 2. Միացրեք կարգավորիչի բալանսային լարման ելքը (SMA-ի կամ 2.54 մմ 2-փինային գլխավորի միջոցով) մոդուլյատորի բալանսային միացքին:
Քայլ 3. Կարգավորիչը ապահովեք +15V և -15V հաստատուն հոսանքի լարումներով։
Քայլ 4. Վերագործարկեք կառավարիչը, և այն կսկսի աշխատել։
ՆՇՈՒՄ։ Կառավարիչը վերագործարկելուց առաջ համոզվեք, որ ամբողջ համակարգի RF ազդանշանը միացված է։
Rofea Optoelectronics-ը առաջարկում է առևտրային էլեկտրոօպտիկական մոդուլյատորների, փուլային մոդուլյատորների, ինտենսիվության մոդուլյատորների, լուսադետեկտորների, լազերային լույսի աղբյուրների, DFB լազերների, օպտիկական ուժեղացուցիչների, EDFA, SLD լազերների, QPSK մոդուլյացիայի, իմպուլսային լազերի, լույսի դետեկտորի, հավասարակշռված լուսադետեկտորի, լազերային դրայվերի, օպտիկամանրաթելային ուժեղացուցիչի, օպտիկական հզորության չափիչի, լայնաշերտ լազերի, կարգավորվող լազերի, օպտիկական դետեկտորի, լազերային դիոդային դրայվերի, օպտիկական ուժեղացուցիչի արտադրանքի շարք: Մենք նաև մատակարարում ենք բազմաթիվ մոդուլյատորներ անհատականացման համար, ինչպիսիք են 1*4 զանգվածային փուլային մոդուլյատորները, գերցածր Vpi և գերբարձր մարման հարաբերակցության մոդուլյատորները, որոնք հիմնականում օգտագործվում են համալսարաններում և ինստիտուտներում:
Հուսով ենք, որ մեր արտադրանքը օգտակար կլինի ձեզ և ձեր հետազոտության համար։


